
המבנה והעיצוב של רכב חשמלי טהור שונים מזה של רכב מסורתי עם מנוע בעירה פנימית. זוהי גם הנדסת מערכת מורכבת. הוא צריך לשלב את טכנולוגיית סוללת הכוח, טכנולוגיית הנעה מנוע, טכנולוגיית רכב ותיאוריית בקרה מודרנית כדי להשיג תהליך בקרה אופטימלי. בתוכנית הפיתוח של המדע והטכנולוגיה של כלי רכב חשמליים, המדינה ממשיכה לדבוק בפריסת המו"פ של "שלושה אנכיים ושלושה אופקיים", ומדגישה עוד יותר את המחקר על טכנולוגיות מפתח נפוצות של "שלושה אופקיים" על פי אסטרטגיית הטרנספורמציה הטכנולוגית של "כונן חשמלי טהור", כלומר, המחקר על מנוע ההנעה ומערכת הבקרה שלו, סוללת החשמל ומערכת הניהול שלו ומערכת בקרת הכוח. כל יצרן גדול מגבש את אסטרטגיית הפיתוח העסקית שלו בהתאם לאסטרטגיית הפיתוח הלאומית.
המחבר ממיין את טכנולוגיות המפתח בתהליך הפיתוח של מערכת הנעה אנרגטית חדשה, ומספק בסיס תיאורטי והתייחסות לתכנון, בדיקה וייצור של מערכת ההינע. התוכנית מחולקת לשלושה פרקים כדי לנתח את טכנולוגיות המפתח של הנעה חשמלית במערכת ההנעה של כלי רכב חשמליים טהורים. היום, נציג תחילה את העיקרון והסיווג של טכנולוגיות הנעה חשמלית.
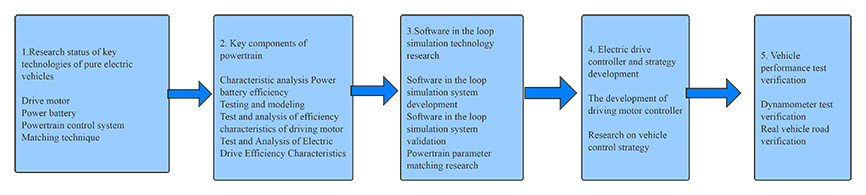
איור 1 קישורים מרכזיים בפיתוח מערכת הינע
נכון לעכשיו, טכנולוגיות המפתח העיקריות של מערכת הינע לרכב חשמלי טהור כוללות את ארבע הקטגוריות הבאות:
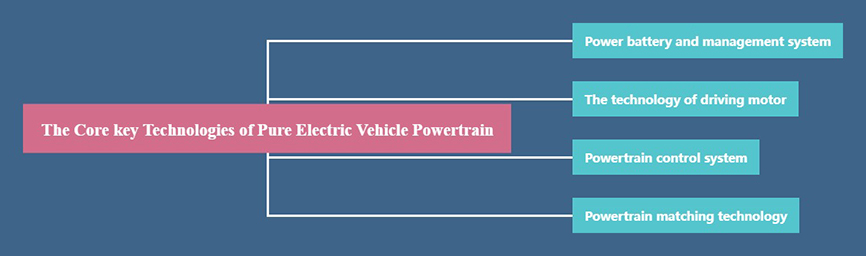
איור 2 טכנולוגיות המפתח העיקריות של Powertrain
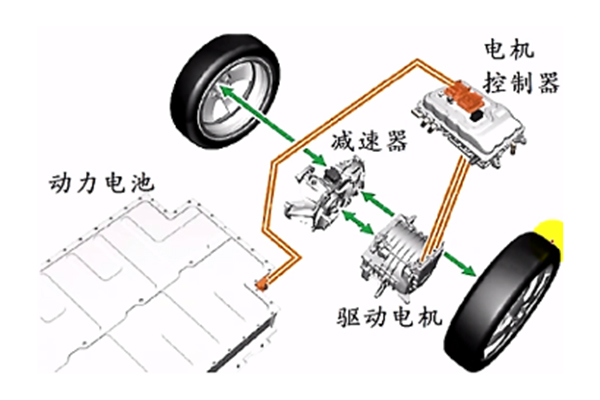
ההגדרה של מערכת מנוע נהיגה
על פי מצב סוללת החשמל של הרכב ודרישות הכוח של הרכב, הוא ממיר את תפוקת האנרגיה החשמלית על ידי התקן לייצור כוח אחסון אנרגיה על הלוח לאנרגיה מכנית, והאנרגיה מועברת לגלגלים המניעים דרך מכשיר השידור והחלקים האנרגיה המכנית של הרכב מומרת לאנרגיה חשמלית ומוזנת בחזרה להתקן אחסון האנרגיה כאשר הרכב בולם. מערכת ההנעה החשמלית כוללת מנוע, מנגנון הילוכים, בקר מנוע ורכיבים נוספים. התכנון של פרמטרים טכניים של מערכת הנעת אנרגיה חשמלית כולל בעיקר כוח, מומנט, מהירות, מתח, יחס שידור של הפחתת, קיבול אספקת החשמל, הספק פלט, מתח, זרם וכו '.

1) בקר מנוע
נקרא גם מהפך, הוא משנה את כניסת הזרם הישר על ידי ערכת הסוללות החשמלית לזרם חילופין. רכיבי ליבה:
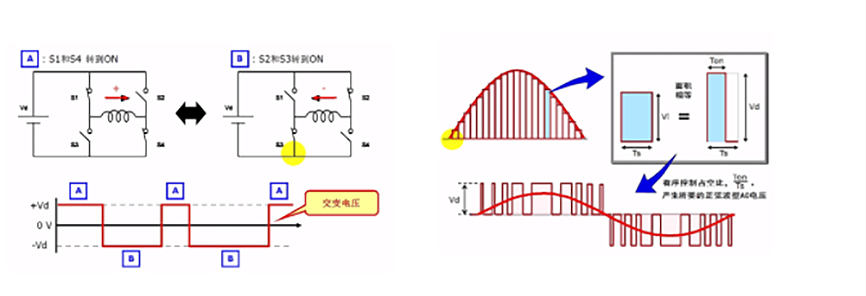
◎ IGBT: מתג אלקטרוני כוח, עיקרון: דרך הבקר, שליטה בזרוע גשר IGBT כדי לסגור מתג תדר מסוים ומתג רצף ליצירת זרם חילופין תלת פאזי. על ידי שליטה במתג האלקטרוני הכוח לסגירה, ניתן להמיר את מתח החילופין. ואז מתח AC נוצר על ידי שליטה במחזור העבודה.
◎ קיבול הסרט: פונקציית סינון; חיישן זרם: זיהוי הזרם של סלילה תלת פאזי.
2) מעגל בקרה ונהיגה: לוח בקרת מחשב, נהיגה IGBT
תפקידו של בקר המנוע הוא להמיר DC ל-AC, לקבל כל אות ולהוציא את ההספק והמומנט המתאימים. רכיבי ליבה: מתג אלקטרוני, קבל סרט, חיישן זרם, מעגל כונן בקרה לפתיחת מתגים שונים, יצירת זרמים בכיוונים שונים ויצירת מתח חילופין. לכן, נוכל לחלק את זרם החילופין הסינוסואיד למלבנים. שטח המלבנים הופך למתח באותו גובה. ציר ה-X מממש את בקרת האורך על ידי שליטה במחזור העבודה, ולבסוף מממש את ההמרה המקבילה של השטח. בדרך זו, ניתן לשלוט בכוח ה-DC כדי לסגור את זרוע הגשר של IGBT במתג תדר ורצף מסוימים דרך הבקר כדי ליצור מתח AC תלת פאזי.
נכון להיום, מרכיבי המפתח של מעגל ההנעה מסתמכים על יבוא: קבלים, צינורות מתג IGBT/MOSFET, DSP, שבבים אלקטרוניים ומעגלים משולבים, הניתנים לייצור עצמאי אך בעלי קיבולת חלשה: מעגלים מיוחדים, חיישנים, מחברים, אשר יכולים להיות מיוצרים באופן עצמאי. מיוצר באופן עצמאי: ספקי כוח, דיודות, משרנים, לוחות מעגלים רב שכבתיים, חוטים מבודדים, רדיאטורים.
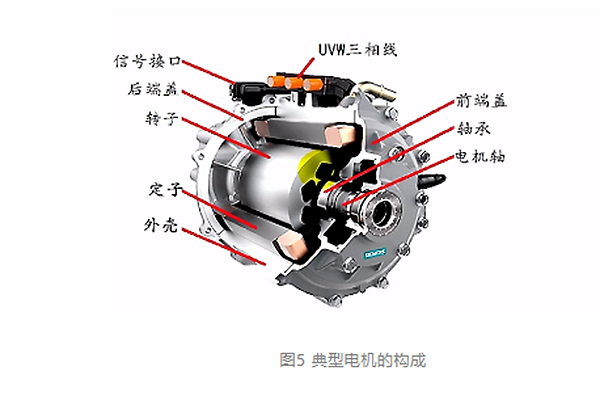
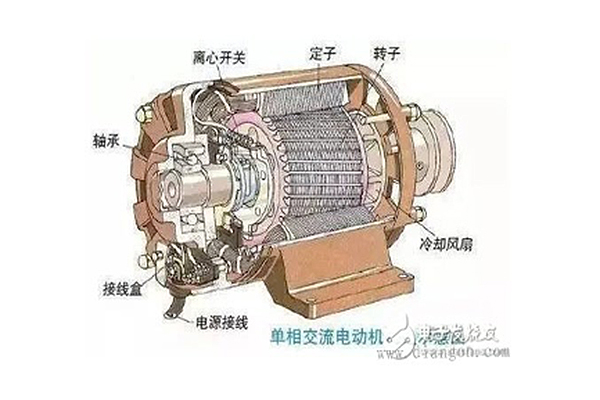
3) מנוע: המרת זרם חילופין תלת פאזי למכונות
◎ מבנה: כיסויים קדמיים ואחוריים, קונכיות, פירים ומסבים
◎ מעגל מגנטי: ליבת סטטור, ליבת רוטור
◎ מעגל: סלילת סטטור, מוליך רוטור
4) מכשיר שידור
תיבת ההילוכים או המפחית הופכת את תפוקת מהירות המומנט על ידי המנוע למהירות ולמומנט הנדרשים לכל הרכב.
סוג מנוע נהיגה
מנועי הנהיגה מחולקים לארבע הקטגוריות הבאות. נכון לעכשיו, מנועי אינדוקציה AC ומנועים סינכרוניים מגנט קבוע הם הסוגים הנפוצים ביותר של כלי רכב חשמליים חדשים באנרגיה. אז אנו מתמקדים בטכנולוגיה של מנוע אינדוקציה AC ומנוע סינכרוני מגנט קבוע.
| מנוע DC | מנוע אינדוקציה AC | מנוע סינכרוני מגנט קבוע | מנוע סרבנות מוחלף | |
| יִתרוֹן | עלות נמוכה יותר, דרישות נמוכות של מערכת בקרה | עלות נמוכה, כיסוי כוח רחב, טכנולוגיית בקרה מפותחת, אמינות גבוהה | צפיפות הספק גבוהה, יעילות גבוהה, גודל קטן | מבנה פשוט, דרישות נמוכות של מערכת בקרה |
| חִסָרוֹן | דרישות תחזוקה גבוהות, מהירות נמוכה, מומנט נמוך, אורך חיים קצר | אזור יעיל קטן צפיפות כוח נמוכה | עלות גבוהה הסתגלות סביבתית לקויה | תנודת מומנט גדולה רעש עבודה גבוה |
| בַּקָשָׁה | רכב חשמלי קטן או מיני במהירות נמוכה | רכב עסקי ורכב נוסעים חשמלי | רכב עסקי ורכב נוסעים חשמלי | רכב עם כוח תערובת |
 1) מנוע אסינכרוני אינדוקציה AC
1) מנוע אסינכרוני אינדוקציה AC
עקרון העבודה של מנוע אסינכרוני אינדוקטיבי AC הוא שהפיתול יעבור דרך חריץ הסטטור והרוטור: הוא מוערם על ידי יריעות פלדה דקות עם מוליכות מגנטית גבוהה. החשמל התלת פאזי יעבור דרך הפיתול. לפי חוק האינדוקציה האלקטרומגנטית של פאראדיי, ייווצר שדה מגנטי מסתובב, וזו הסיבה שהרוטור מסתובב. שלושת הסלילים של הסטטור מחוברים במרווח של 120 מעלות, והמוליך נושא הזרם יוצר שדות מגנטיים סביבם. כאשר הספק התלת פאזי מופעל על סידור מיוחד זה, השדות המגנטיים ישתנו לכיוונים שונים עם שינוי זרם החילופין בזמן מסוים, וייצור שדה מגנטי בעל עוצמת סיבוב אחידה. מהירות הסיבוב של השדה המגנטי נקראת מהירות סינכרונית. נניח שמוליך סגור מוצב בפנים, על פי חוק פאראדיי, מכיוון שהשדה המגנטי משתנה, הלולאה תחוש את הכוח האלקטרו-מוטיבי, שייצור זרם בלולאה. המצב הזה הוא בדיוק כמו הלולאה נושאת הזרם בשדה המגנטי, שמייצרת כוח אלקטרומגנטי על הלולאה, והואן ג'יאנג מתחיל להסתובב. באמצעות משהו דומה לכלוב סנאי, זרם חילופין תלת פאזי יפיק שדה מגנטי מסתובב דרך הסטטור, והזרם יושרה בסרגל כלוב הסנאי המקוצר בטבעת הקצה, כך שהרוטור מתחיל להסתובב, כלומר מדוע המנוע נקרא מנוע אינדוקציה. בעזרת אינדוקציה אלקטרומגנטית ולא מחובר ישירות לרוטור להשראת חשמל, ממלאים פתיתי ליבת ברזל מבודדים ברוטור, כך שהברזל הקטן מבטיח את אובדן זרם המערבולת המינימלי.
2) מנוע AC סינכרוני
הרוטור של מנוע סינכרוני שונה מזה של מנוע אסינכרוני. המגנט הקבוע מותקן על הרוטור, אותו ניתן לחלק לסוג רכוב משטח וסוג מוטבע. הרוטור עשוי מפלדת סיליקון, והמגנט הקבוע מוטבע. הסטטור מחובר גם עם זרם חילופין בהפרש פאזה של 120, השולט בגודל ובפאזה של זרם החילופין של גלי הסינוס, כך שהשדה המגנטי שנוצר מהסטטור הפוך לזה שיוצר הרוטור, והמגנטי. השדה מסתובב. בדרך זו, הסטטור נמשך על ידי מגנט ומסתובב עם הרוטור. מחזור אחרי מחזור נוצר על ידי ספיגת סטטור ורוטור.
מסקנה: ההנעה המנועית של כלי רכב חשמליים הפכה בעצם למיינסטרים, אבל היא לא יחידה אלא מגוונת. לכל מערכת הנעה מנוע יש אינדקס מקיף משלה. כל מערכת מיושמת בהנעת הרכב החשמלי הקיים. רובם מנועים אסינכרוניים ומנועים סינכרוניים מגנט קבוע, בעוד שחלקם מנסים להחליף מנועים סרבנות. ראוי לציין כי כונן מנוע משלב טכנולוגיית אלקטרוניקה כוח, טכנולוגיית מיקרואלקטרוניקה, טכנולוגיה דיגיטלית, טכנולוגיית בקרה אוטומטית, מדעי החומר ודיסציפלינות אחרות כדי לשקף את סיכויי היישום והפיתוח המקיפים של דיסציפלינות מרובות. הוא מתחרה חזק במנועי רכב חשמליים. כדי לתפוס מקום בכלי רכב חשמליים בעתיד, כל מיני מנועים צריכים לא רק לייעל את מבנה המנוע, אלא גם לחקור כל הזמן את ההיבטים החכמים והדיגיטליים של מערכת הבקרה.
זמן פרסום: 30 בינואר 2023


