
בהשוואה למנועי שטף רדיאלי, למנועי שטף צירי יש יתרונות רבים בתכנון רכב חשמלי. לדוגמה, מנועי שטף צירי יכולים לשנות את עיצוב מערכת ההינע על ידי הזזת המנוע מהציר אל פנים הגלגלים.
1.ציר הכוח
מנועי שטף ציריזוכים לתשומת לב הולכת וגוברת (לקבל אחיזה). במשך שנים רבות, סוג זה של מנוע נמצא בשימוש ביישומים נייחים כגון מעליות ומכונות חקלאיות, אך במהלך העשור האחרון, מפתחים רבים פעלו לשיפור טכנולוגיה זו וליישם אותה על אופנועים חשמליים, תרמילים לנמל תעופה, משאיות מטען, חשמל כלי רכב, ואפילו מטוסים.
מנועי שטף רדיאלי מסורתיים משתמשים במגנטים קבועים או במנועי אינדוקציה, שעשו התקדמות משמעותית באופטימיזציה של משקל ועלות. עם זאת, הם מתמודדים עם קשיים רבים להמשיך ולהתפתח. שטף צירי, סוג שונה לחלוטין של מנוע, עשוי להיות חלופה טובה.
בהשוואה למנועים רדיאליים, שטח הפנים המגנטי האפקטיבי של מנועי מגנט קבוע שטף צירי הוא פני השטח של רוטור המנוע, ולא הקוטר החיצוני. לכן, בנפח מסוים של מנוע, מנועי מגנט קבוע שטף צירי יכולים לספק בדרך כלל מומנט גדול יותר.
מנועי שטף ציריהם יותר קומפקטיים; בהשוואה למנועים רדיאליים, האורך הצירי של המנוע קצר בהרבה. עבור מנועי גלגלים פנימיים, זה לעתים קרובות גורם מכריע. המבנה הקומפקטי של מנועים צירים מבטיח צפיפות הספק וצפיפות מומנט גבוהים יותר מאשר מנועים רדיאליים דומים, ובכך מבטל את הצורך במהירויות פעולה גבוהות במיוחד.
היעילות של מנועי שטף צירי גבוהה מאוד, בדרך כלל עולה על 96%. זאת הודות לנתיב השטף החד-מימדי הקצר יותר, אשר ניתן להשוואה או אפילו גבוה יותר ביעילותו בהשוואה למנועי השטף הרדיאלי הדו-ממדיים הטובים ביותר בשוק.
אורך המנוע קצר יותר, לרוב קצר פי 5 עד 8, וגם המשקל מופחת פי 2 עד 5. שני גורמים אלו שינו את בחירתם של מעצבי פלטפורמות לרכב חשמלי.
2. טכנולוגיית שטף צירי
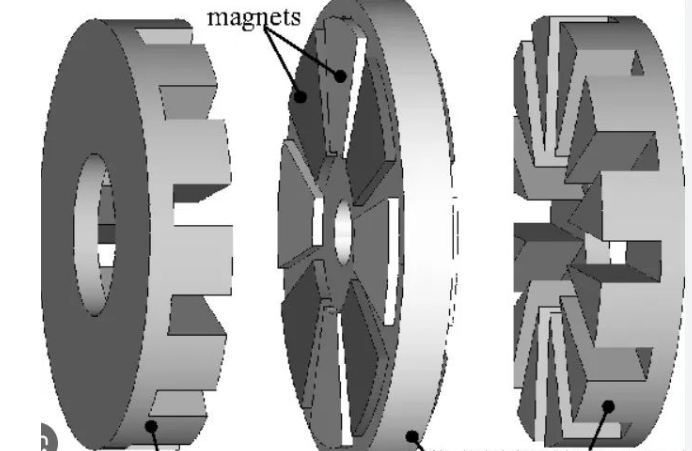
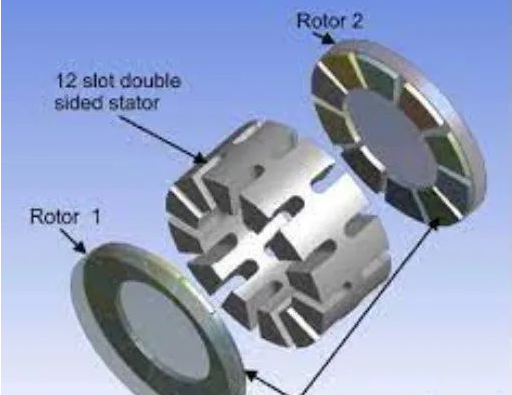
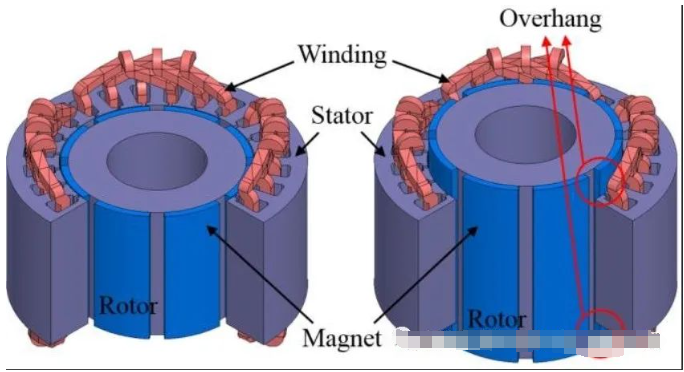
קיימות שתי טופולוגיות עיקריות עבורמנועי שטף צירי: סטטור יחיד רוטור כפול (המכונה לפעמים מכונות בסגנון טורוס) וסטטור כפול רוטור יחיד.
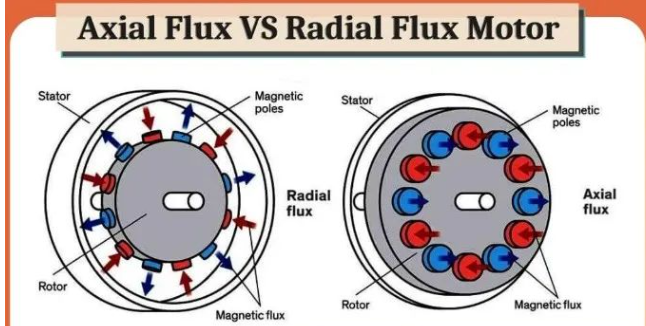
נכון לעכשיו, רוב מנועי המגנט הקבוע משתמשים בטופולוגיה של שטף רדיאלי. מעגל השטף המגנטי מתחיל עם מגנט קבוע על הרוטור, עובר דרך השן הראשונה על הסטטור, ואז זורם רדיאלית לאורך הסטטור. לאחר מכן עברו דרך השן השנייה כדי להגיע לפלדה המגנטית השנייה על הרוטור. בטופולוגיה של שטף צירי רוטור כפול, לולאת השטף מתחילה מהמגנט הראשון, עוברת בציר דרך שיני הסטטור ומגיעה מיד למגנט השני.
המשמעות היא שמסלול השטף קצר בהרבה מזה של מנועי השטף הרדיאלי, וכתוצאה מכך נפחי מנוע קטנים יותר, צפיפות הספק ויעילות גבוהה יותר באותו הספק.
מנוע רדיאלי, שבו השטף המגנטי עובר דרך השן הראשונה ואז חוזר לשן הבאה דרך הסטטור, ומגיע למגנט. השטף המגנטי הולך בנתיב דו מימדי.
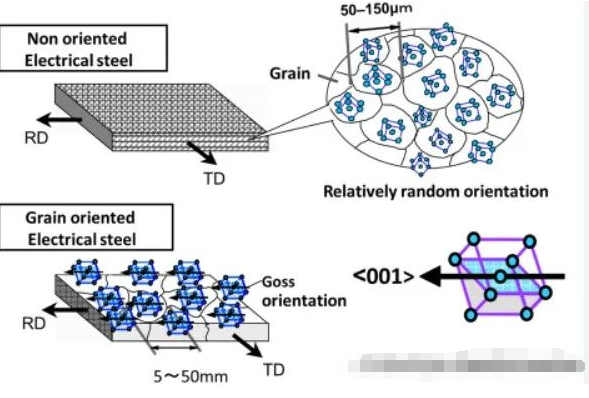
נתיב השטף המגנטי של מכונת שטף מגנטי צירית הוא חד מימדי, כך שניתן להשתמש בפלדה חשמלית מכוונת גרגר. פלדה זו מקלה על מעבר השטף, ובכך משפרת את היעילות.
מנועי שטף רדיאלי משתמשים באופן מסורתי בפיתולים מבוזרים, כאשר עד מחצית מהקצוות המתפתלים אינם פועלים. תוספת הסליל תגרום למשקל, עלות, התנגדות חשמלית ועוד איבוד חום, שיאלץ את המתכננים לשפר את עיצוב הפיתול.
הסליל מסתיים שלמנועי שטף ציריהם הרבה פחות, וכמה עיצובים משתמשים בפיתולים מרוכזים או מפולחים, שהם יעילים לחלוטין. עבור מכונות רדיאליות של סטטור מפולח, הקרע של נתיב השטף המגנטי בסטטור יכול להביא להפסדים נוספים, אך עבור מנועי שטף צירי, זו לא בעיה. עיצוב סליל הסליל הוא המפתח להבחנה בין רמת הספקים.
3. פיתוח
מנועי שטף צירי עומדים בפני כמה אתגרים רציניים בתכנון וייצור, למרות היתרונות הטכנולוגיים שלהם, העלויות שלהם גבוהות בהרבה מאלה של מנועים רדיאליים. לאנשים יש הבנה מעמיקה מאוד של מנועים רדיאליים, ושיטות ייצור וציוד מכני זמינים גם הם.
אחד האתגרים העיקריים של מנועי שטף צירי הוא לשמור על מרווח אוויר אחיד בין הרוטור לסטטור, שכן הכוח המגנטי גדול בהרבה מזה של מנועים רדיאליים, מה שמקשה על שמירת מרווח אוויר אחיד. למנוע השטף הצירי של הרוטור הכפול יש גם בעיות של פיזור חום, שכן הפיתול ממוקם עמוק בתוך הסטטור ובין שני הדיסקים הרוטורים, מה שמקשה מאוד על פיזור החום.
גם מנועי שטף צירי קשים לייצור מסיבות רבות. מכונת הרוטור הכפול המשתמשת במכונת רוטור כפולה עם טופולוגיית yokes (כלומר הסרת עול הברזל מהסטטור אך שמירה על שיני הברזל) מתגברת על חלק מהבעיות הללו מבלי להרחיב את קוטר המנוע והמגנט.
עם זאת, הסרת העול מביאה לאתגרים חדשים, כגון כיצד לתקן ולמקם שיניים בודדות ללא חיבור עול מכני. קירור הוא גם אתגר גדול יותר.
כמו כן, קשה לייצר את הרוטור ולשמור על מרווח האוויר, מכיוון שדיסק הרוטור מושך את הרוטור. היתרון הוא שדיסקיות הרוטור מחוברות ישירות דרך טבעת פיר, כך שהכוחות מבטלים זה את זה. המשמעות היא שהמיסב הפנימי אינו עומד בכוחות אלו, ותפקידו היחיד הוא להשאיר את הסטטור במצב האמצעי בין שני הדיסקים הרוטורים.
מנועים עם רוטור בודד בסטטור כפול אינם מתמודדים עם האתגרים של מנועים מעגליים, אך העיצוב של הסטטור מורכב הרבה יותר וקשה להשיג אוטומציה, וגם העלויות הנלוות גבוהות. שלא כמו כל מנוע שטף רדיאלי מסורתי, תהליכי ייצור של מנוע צירי וציוד מכני הופיעו רק לאחרונה.
4. יישום של רכבים חשמליים
אמינות היא חיונית בתעשיית הרכב, ומוכיחה את האמינות והחוסן של שוניםמנועי שטף צירילשכנע יצרנים שהמנועים הללו מתאימים לייצור המוני תמיד היה אתגר. זה גרם לספקי מנועים ציריים לבצע תוכניות אימות נרחבות בעצמם, כאשר כל ספק מוכיח שאמינות המנוע שלהם אינה שונה ממנועי שטף רדיאלי מסורתיים.
הרכיב היחיד שיכול להתבלות ב-מנוע שטף ציריהוא המיסבים. אורך השטף המגנטי הצירי קצר יחסית, ומיקום המיסבים קרוב יותר, בדרך כלל מתוכנן להיות מעט "ממדי יתר". למרבה המזל, למנוע השטף הצירי יש מסת רוטור קטנה יותר והוא יכול לעמוד בעומסי פיר דינמיים נמוכים יותר של הרוטור. לכן, הכוח המופעל בפועל על המסבים קטן בהרבה מזה של מנוע השטף הרדיאלי.

סרן אלקטרוני הוא אחד היישומים הראשונים של מנועים צירים. הרוחב הדק יותר יכול להכיל את המנוע ותיבת ההילוכים בציר. ביישומים היברידיים, האורך הצירי הקצר יותר של המנוע בתורו מקצר את האורך הכולל של מערכת ההילוכים.
השלב הבא הוא התקנת המנוע הצירי על הגלגל. בדרך זו ניתן להעביר כוח ישירות מהמנוע אל הגלגלים, ולשפר את יעילות המנוע. בשל ביטול הילוכים, דיפרנציאלים וגילי הנעה, גם המורכבות של המערכת הופחתה.
עם זאת, נראה שעדיין לא הופיעו תצורות סטנדרטיות. כל יצרן ציוד מקורי חוקר תצורות ספציפיות, שכן הגדלים והצורות השונים של מנועים צירים יכולים לשנות את העיצוב של כלי רכב חשמליים. בהשוואה למנועים רדיאליים, למנועים צירים יש צפיפות הספק גבוהה יותר, מה שאומר שניתן להשתמש במנועים צירים קטנים יותר. זה מספק אפשרויות עיצוב חדשות עבור פלטפורמות רכב, כגון מיקום מארזי סוללות.
4.1 אבזור מפולח
טופולוגיית המנוע של YASA (Yokeless and Segmented Armature) היא דוגמה לטופולוגיה של סטאטור יחיד עם רוטור כפול, אשר מפחיתה את מורכבות הייצור ומתאימה לייצור המוני אוטומטי. למנועים אלו צפיפות הספק של עד 10 קילוואט/ק"ג במהירויות של 2000 עד 9000 סל"ד.

באמצעות בקר ייעודי, הוא יכול לספק זרם של 200 קילוואט למנוע. הבקר בנפח של כ-5 ליטר ומשקלו 5.8 קילוגרם כולל ניהול תרמי עם קירור שמן דיאלקטרי, מתאים למנועי שטף צירי וכן למנועי שטף אינדוקציה ורדיאלי.
זה מאפשר ליצרני ציוד מקורי לרכב חשמלי ולמפתחי מדרגה ראשונה לבחור בגמישות את המנוע המתאים על סמך היישום והשטח הפנוי. הגודל והמשקל הקטנים יותר הופכים את הרכב לקל יותר ולבעל יותר סוללות, ובכך מגדילים את הדחיפה של הטווח.
5. יישום אופנועים חשמליים
עבור אופנועים חשמליים וטרקטורונים, חלק מהחברות פיתחו מנועי שטף צירי AC. העיצוב הנפוץ עבור רכב מסוג זה הוא עיצובי שטף צירי מבוסס מברשת DC, בעוד שהמוצר החדש הוא עיצוב ללא מברשות אטום לחלוטין עם AC.
הסלילים של מנועי DC ו-AC נשארים נייחים, אך הרוטורים הכפולים משתמשים במגנטים קבועים במקום אבזור מסתובב. היתרון של שיטה זו הוא שאינה דורשת היפוך מכני.
העיצוב צירי AC יכול להשתמש גם בבקרי מנוע AC תלת פאזיים סטנדרטיים עבור מנועים רדיאליים. זה עוזר להפחית עלויות, שכן הבקר שולט בזרם המומנט, לא במהירות. הבקר דורש תדר של 12 קילו-הרץ ומעלה, שהוא התדר המרכזי של מכשירים כאלה.
התדר הגבוה יותר מגיע מהשראות הפיתול הנמוכה יותר של 20 µH. התדר יכול לשלוט בזרם כדי למזער את אדוות הזרם ולהבטיח אות סינוסואיד חלק ככל האפשר. מנקודת מבט דינמית, זוהי דרך מצוינת להשיג שליטה חלקה יותר במנוע על ידי מתן אפשרות לשינויי מומנט מהירים.
עיצוב זה מאמץ סלילה דו-שכבתית מבוזרת, כך שהשטף המגנטי זורם מהרוטור לרוטור אחר דרך הסטטור, עם מסלול קצר מאוד ויעילות גבוהה יותר.
המפתח לתכנון זה הוא שהוא יכול לפעול במתח מרבי של 60 וולט ואינו מתאים למערכות מתח גבוהות יותר. לכן, ניתן להשתמש בו עבור אופנועים חשמליים וכלי רכב בעלי ארבעה גלגלים מסוג L7e כגון רנו טוויזי.
המתח המרבי של 60 וולט מאפשר שילוב של המנוע במערכות חשמל 48 וולט מיינסטרים ומקל על עבודות התחזוקה.
מפרטי האופנוע הארבע-גלגלי L7e בתקנת המסגרת האירופית 2002/24/EC קובעים כי משקל כלי הרכב המשמשים להובלת סחורות אינו עולה על 600 קילוגרם, למעט משקל הסוללות. כלי רכב אלה רשאים לשאת לא יותר מ-200 ק"ג של נוסעים, לא יותר מ-1000 ק"ג של מטען, ולא יותר מ-15 קילו-ואט של כוח מנוע. שיטת הפיתול המבוזר יכולה לספק מומנט של 75-100 ננומטר, עם הספק שיא של 20-25 קילוואט והספק רציף של 15 קילוואט.
האתגר של השטף הצירי טמון באופן שבו פיתולי נחושת מפזרים חום, וזה קשה כי חום חייב לעבור דרך הרוטור. הפיתול המבוזר הוא המפתח לפתרון בעיה זו, מכיוון שיש לו מספר רב של חריצי מוט. באופן זה, יש שטח פנים גדול יותר בין הנחושת למעטפת, וניתן להעביר חום החוצה ולהוציא אותו באמצעות מערכת קירור נוזלית רגילה.
קטבים מגנטיים מרובים הם המפתח לניצול צורות גל סינוסאידיאליות, המסייעות בהפחתת הרמוניות. הרמוניות אלו באות לידי ביטוי כחימום של המגנטים והליבה, בעוד שרכיבי נחושת אינם יכולים לסחוב את החום. כאשר חום מצטבר במגנטים ובליבות ברזל, היעילות פוחתת, וזו הסיבה שאופטימיזציה של צורת הגל ונתיב החום היא חיונית לביצועי המנוע.
עיצוב המנוע עבר אופטימיזציה כדי להפחית עלויות ולהשיג ייצור המוני אוטומטי. טבעת דיור שחול אינה דורשת עיבוד מכני מורכב ויכולה להפחית את עלויות החומר. ניתן ללפף את הסליל ישירות ובתהליך מליטה נעשה שימוש במהלך תהליך הליפול כדי לשמור על צורת ההרכבה הנכונה.
נקודת המפתח היא שהסליל עשוי מחוט סטנדרטי זמין מסחרית, בעוד שליבת הברזל מרובדת עם פלדה רגילה של שנאי המדף, שפשוט צריך לחתוך לצורה. עיצובי מנועים אחרים דורשים שימוש בחומרים מגנטיים רכים בלמינציה הליבה, אשר עשוי להיות יקר יותר.
השימוש בפיתולים מבוזרים פירושו שאין צורך לפלח את הפלדה המגנטית; הם יכולים להיות צורות פשוטות יותר וקל יותר לייצור. להקטנת גודל הפלדה המגנטית והבטחת קלות הייצור שלה יש השפעה משמעותית על הפחתת העלויות.
העיצוב של מנוע שטף צירי זה יכול להיות גם מותאם אישית בהתאם לדרישות הלקוח. ללקוחות יש גרסאות מותאמות אישית שפותחו סביב עיצוב בסיסי. לאחר מכן מיוצר בקו ייצור ניסיון לאימות ייצור מוקדם, שניתן לשכפל במפעלים אחרים.
התאמה אישית היא בעיקר בגלל שביצועי הרכב תלויים לא רק בתכנון של מנוע השטף המגנטי הצירי, אלא גם באיכות מבנה הרכב, ערכת הסוללות וה-BMS.
זמן פרסום: 28-2023 בספטמבר


