
אסינכרוני תלת פאזימָנוֹעַהוא סוג של מנוע אינדוקציה המופעל על ידי חיבור בו זמנית של זרם חילופין תלת פאזי של 380 וולט (הפרש פאזה של 120 מעלות). בשל העובדה שהשדה המגנטי המסתובב של הרוטור והסטטור של מנוע אסינכרוני תלת פאזי מסתובבים באותו כיוון ובמהירויות שונות, יש קצב החלקה, ולכן הוא נקרא מנוע אסינכרוני תלת פאזי.
מהירות הרוטור של מנוע אסינכרוני תלת פאזי נמוכה ממהירות השדה המגנטי המסתובב. סליל הרוטור מייצר כוח אלקטרומגנטי וזרם עקב תנועה יחסית עם השדה המגנטי, ומקיים אינטראקציה עם השדה המגנטי כדי לייצר מומנט אלקטרומגנטי, ומשיג טרנספורמציה של אנרגיה.
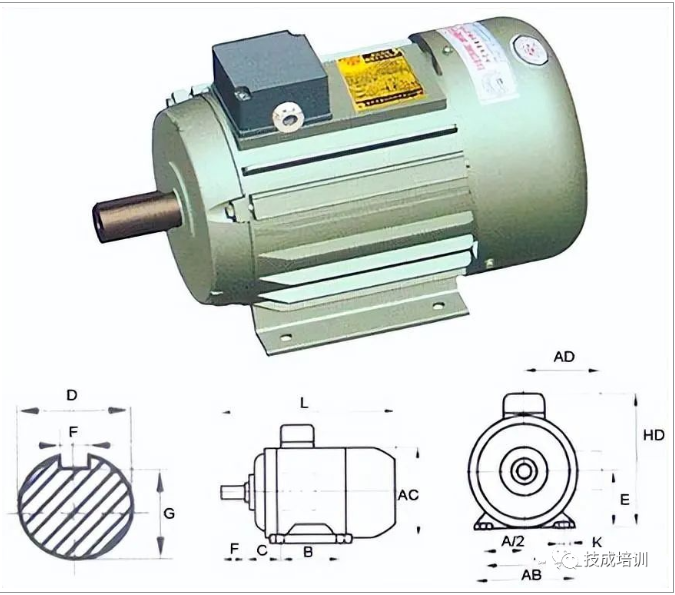
בהשוואה לאסינכרוני חד פאזימנועים, אסינכרוני תלת פאזימנועיםיש ביצועי תפעול טובים יותר ויכולים לחסוך חומרים שונים.
בהתאם למבני הרוטור השונים, ניתן לחלק מנועים אסינכרוניים תלת פאזיים לסוג כלוב וסוג פצע.
למנוע האסינכרוני עם רוטור כלוב יש מבנה פשוט, פעולה אמינה, משקל קל ומחיר נמוך, והוא נמצא בשימוש נרחב. החיסרון העיקרי שלו הוא הקושי בוויסות המהירות.
הרוטור והסטטור של מנוע אסינכרוני תלת פאזי מלופף מצוידים גם הם בפיתולי תלת פאזות ומחוברים לריאוסטט חיצוני באמצעות טבעות החלקה ומברשות. כוונון התנגדות הריאוסטט יכול לשפר את ביצועי ההתנעה של המנוע ולהתאים את מהירות המנוע.
עקרון העבודה של מנוע אסינכרוני תלת פאזי
כאשר מופעל זרם חילופין תלת-פאזי סימטרי על סליל הסטטור התלת-פאזי, נוצר שדה מגנטי מסתובב המסתובב עם כיוון השעון לאורך החלל המעגלי הפנימי של הסטטור והרוטור במהירות סינכרונית n1.
מכיוון שהשדה המגנטי המסתובב מסתובב במהירות n1, מוליך הרוטור נייח בהתחלה, כך שמוליך הרוטור יחתוך את השדה המגנטי המסתובב של הסטטור כדי לייצר כוח אלקטרו-מניע מושרה (כיוון הכוח האלקטרו-מניע המושרה נקבע על ידי כלל יד ימין).
עקב קצר חשמלי של מוליך הרוטור בשני קצותיו על ידי טבעת קצר חשמלי, תחת פעולת הכוח האלקטרו-מונע המושרה, מוליך הרוטור ייצר זרם מושרה שהוא בעצם באותו כיוון כמו הכוח האלקטרו-מונע המושרה. מוליך הזרם של הרוטור נתון לכוח אלקטרומגנטי בשדה המגנטי של הסטטור (כיוון הכוח נקבע באמצעות כלל יד שמאל). כוח אלקטרומגנטי מייצר מומנט אלקטרומגנטי על ציר הרוטור, מה שמניע את הרוטור להסתובב בכיוון השדה המגנטי המסתובב.
באמצעות הניתוח לעיל, ניתן להסיק כי עקרון הפעולה של מנוע חשמלי הוא כדלקמן: כאשר סלילי הסטטור התלת-פאזיים של המנוע (כל אחד עם הפרש זווית חשמלי של 120 מעלות) מוזנים בזרם חילופין סימטרי תלת-פאזי, נוצר שדה מגנטי מסתובב, אשר חותך את סליל הרוטור ומייצר זרם מושרה בסליל הרוטור (סליל הרוטור הוא מעגל סגור). מוליך הרוטור הנושא את הזרם ייצור כוח אלקטרומגנטי תחת פעולת השדה המגנטי המסתובב של הסטטור, וכך נוצר מומנט אלקטרומגנטי על ציר המנוע, מה שמניע את המנוע להסתובב באותו כיוון כמו השדה המגנטי המסתובב.
דיאגרמת חיווט של מנוע אסינכרוני תלת פאזי
חיווט בסיסי של מנועים אסינכרוניים תלת פאזיים:
ניתן לחלק את ששת החוטים מסליל של מנוע אסינכרוני תלת פאזי לשתי שיטות חיבור בסיסיות: חיבור דלתא דלתא וחיבור כוכבי.
שישה חוטים = שלושה פיתולי מנוע = שלושה קצוות ראש + שלושה קצוות זנב, כאשר מולטימטר מודד את החיבור בין קצוות הראש והזנב של אותו סלילה, כלומר U1-U2, V1-V2, W1-W2.
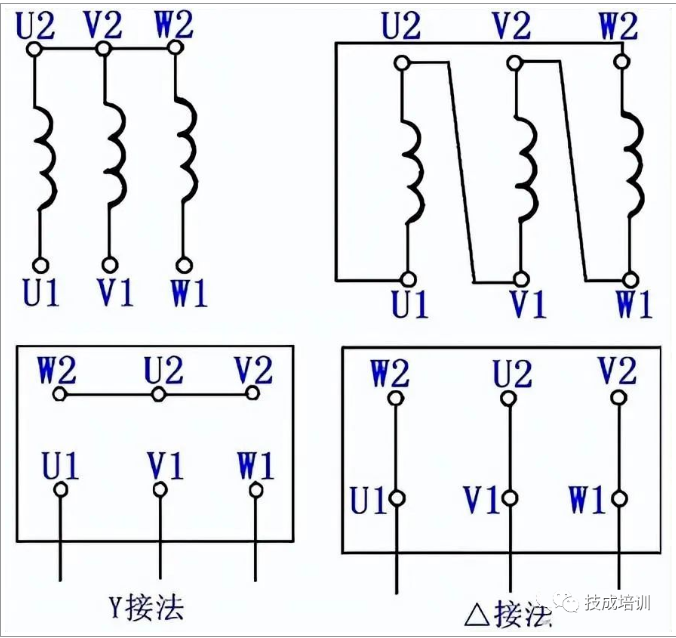
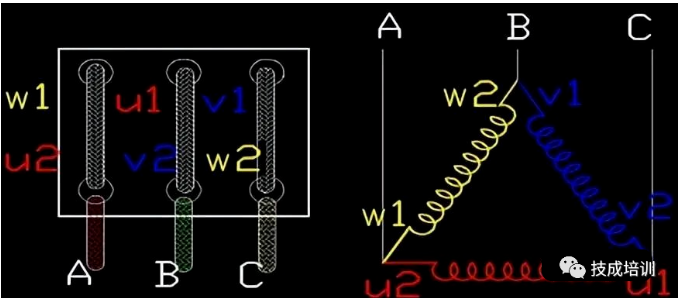
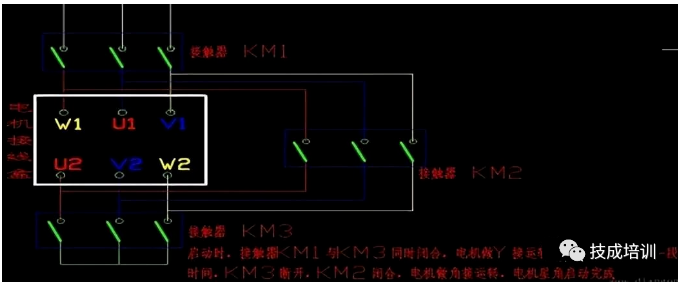
1. שיטת חיבור דלתא משולש עבור מנועים אסינכרוניים תלת פאזיים
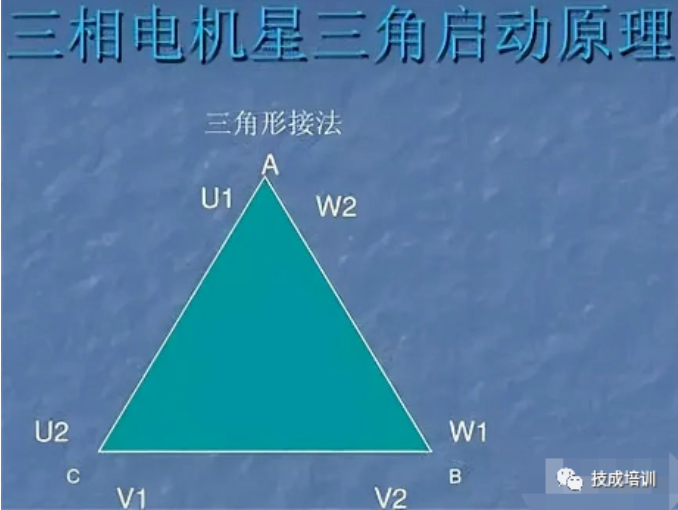
שיטת חיבור דלתא במשולש היא חיבור ראשי וזנבות של שלושה פיתולים ברצף ליצירת משולש, כפי שמוצג באיור:
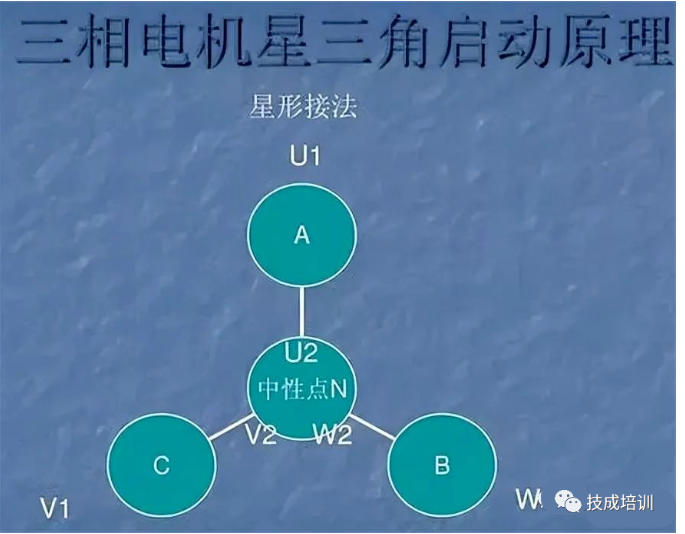
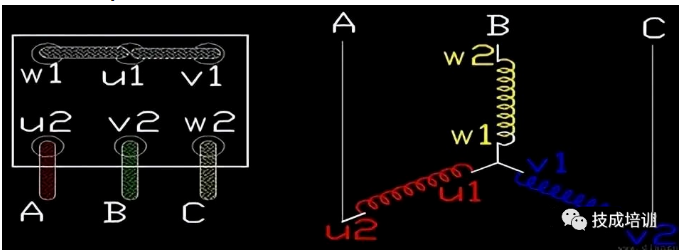
2. שיטת חיבור כוכב עבור מנועים אסינכרוניים תלת פאזיים
שיטת חיבור הכוכבים היא לחבר את הקצוות הזנביים או הראשיים של שלושה פיתולים, ושלושת החוטים האחרים משמשים כחיבורי חשמל. שיטת החיבור כפי שמוצג באיור:
הסבר על תרשים החיווט של מנוע אסינכרוני תלת פאזי באיורים ובטקסט
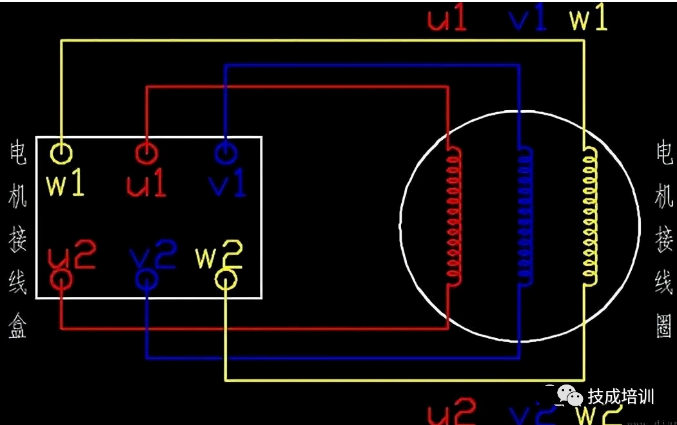
תיבת צומת מנוע תלת פאזי
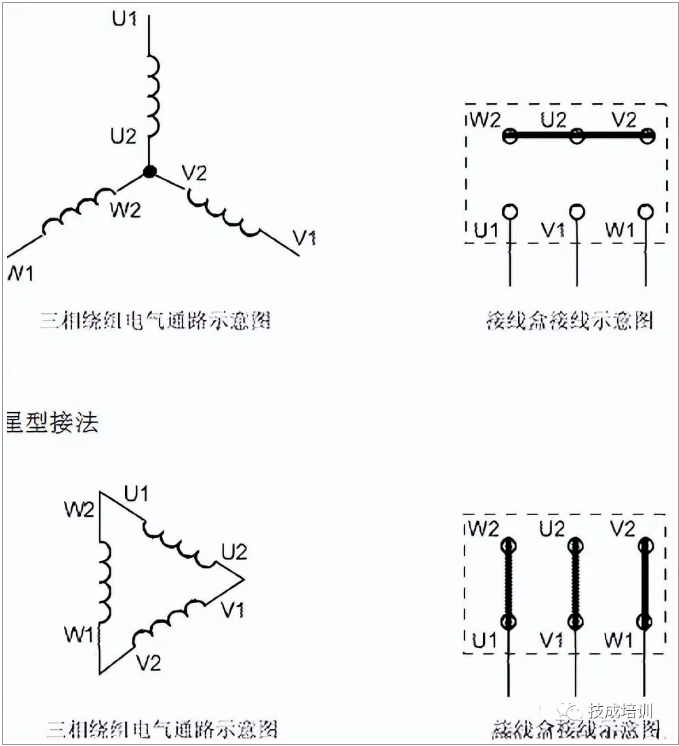
כאשר מחובר מנוע אסינכרוני תלת פאזי, שיטת החיבור של קטע החיבור בתיבת הצומת היא כדלקמן:
כאשר מנוע אסינכרוני תלת פאזי מחובר לפינה, שיטת החיבור של חיבור תיבת הצומת היא כדלקמן:
ישנן שתי שיטות חיבור למנועים אסינכרוניים תלת פאזיים: חיבור כוכב וחיבור משולש.
שיטת הטריאנגולציה
בסלילי ליפוף בעלי אותו מתח וקוטר חוט, לשיטת חיבור הכוכב יש פי שלושה פחות סיבובים לפאזה (פי 1.732) ופי שלושה פחות הספק משיטת חיבור המשולש. שיטת החיבור של המנוע המוגמר נקבעה לעמוד במתח של 380 וולט ובדרך כלל אינה מתאימה לשינוי.
ניתן לשנות את שיטת החיבור רק כאשר רמת המתח התלת-פאזי שונה מ-380 וולט הרגילה. לדוגמה, כאשר רמת המתח התלת-פאזי היא 220 וולט, ניתן לשנות את שיטת חיבור הכוכב של מתח התלת-פאזי המקורי 380 וולט לשיטת חיבור משולש; כאשר רמת המתח התלת-פאזי היא 660 וולט, ניתן לשנות את שיטת חיבור הדלתא המקורית של מתח התלת-פאזי 380 וולט לשיטת חיבור כוכב, וההספק שלו יישאר ללא שינוי. באופן כללי, מנועים בעלי הספק נמוך מחוברים בכוכב, בעוד שמנועים בעלי הספק גבוה מחוברים בדלתא.
במתח מדורג, יש להשתמש במנוע המחובר לדלתא. אם הוא מוחלף למנוע המחובר לכוכב, הוא שייך לפעולה במתח מופחת, וכתוצאה מכך יורדת הספק המנוע ובזרם ההתנעה. בעת הפעלת מנוע בעל הספק גבוה (שיטת חיבור דלתא), הזרם גבוה מאוד. על מנת להפחית את השפעת זרם ההתנעה על הקו, בדרך כלל מאומצת התנעה בהורדת זרם. שיטה אחת היא לשנות את שיטת חיבור הדלתא המקורית לשיטת חיבור כוכב לצורך התנעה. לאחר הפעלת שיטת חיבור הכוכב, היא מומרת חזרה לשיטת חיבור דלתא לצורך פעולה.
דיאגרמת חיווט של מנוע אסינכרוני תלת פאזי
תרשים פיזי של קווי העברה קדימה ואחורה עבור מנועים אסינכרוניים תלת פאזיים:
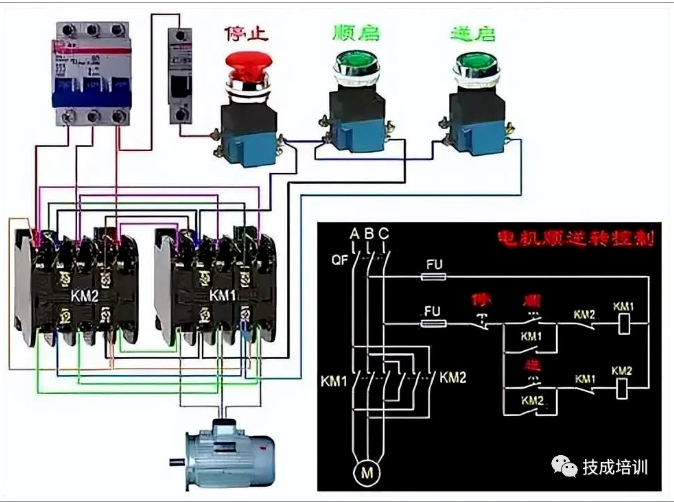
כדי להשיג שליטה קדימה ואחורה של מנוע, ניתן לכוונן כל שתי פאזות של ספק הכוח שלו זו ביחס לזו (אנו קוראים לזה קומוטציה). בדרך כלל, פאזת V נשארת ללא שינוי, ופאזת U ופאזת W מכוונות זו ביחס לזו. על מנת להבטיח שניתן יהיה להחליף באופן אמין את רצף הפאזות של המנוע כאשר שני מגענים פועלים, החיווט צריך להיות עקבי ביציאה העליונה של המגע, ויש לכוונן את הפאזה ביציאה התחתונה של המגען. עקב החלפת רצף הפאזות של שתי הפאזות, יש לוודא ששני סלילי ה-KM לא יופעלו בו זמנית, אחרת עלולים להתרחש תקלות קצר חשמלי חמורות בין פאזות. לכן יש לאמץ אינטרלוק.
מסיבות בטיחותיות, נעשה שימוש לרוב במעגל בקרה כפול עם נעילת כפתורים (מכנית) ונעילת מגען (חשמלית); באמצעות נעילת כפתורים, גם אם לחצני קדימה ואחורה נלחצים בו זמנית, לא ניתן להפעיל בו זמנית את שני המגענים המשמשים לכוונון פאזה, ובכך למנוע קצר חשמלי בין פאזה לפאזה.
בנוסף, עקב שילוב המגעים המופעלים, כל עוד אחד המגעים מופעל, המגע הסגור שלו לא ייסגר. בדרך זו, ביישום שילוב כפול מכני וחשמלי, מערכת אספקת החשמל של המנוע לא יכולה להיווצר קצר חשמלי בין פאזה לפאזה, מה שמגן ביעילות על המנוע וממנע תאונות הנגרמות מקצר חשמלי בין פאזה במהלך אפנון הפאזה, אשר עלולות לשרוף את המגע.
זמן פרסום: 07-08-2023


